




➤ 查看Vector后台数据(CCIS)
客户服务信息界面(CCIS)帮助Vector的玩家或者DDL员工,以相对直观的方式,识别Vector硬件或软件的问题。首先,让我们看看如何进入CCIS。然后我们会看看各种CCIS筛查及其提供的内容。
●如何打开Vector后台:
● 如何进入配对模式:
1. 确保充电底座通电
2. 把Vector放在充电底座上。
3. 如果Vector正在启动,请等待启动完成
4. 双击Vector的顶部按钮
● 进入CCIS界面信息:
1. 轻轻地将Vector的胳膊完全抬起,然后再放到底。
2. CCIS界面第1屏将出现。
● 如何切换其他CCIS界面:
1. 接着上面的操作之后。
2. 轻轻地将Vector的头部旋转到最低,然后再完全抬起来。
●点击顶部按钮(位于Vector背部金色触摸面板中央的LED灯带)即可切换屏幕。
注意:如果没有操作这个步骤,CCIS界面将无法切换其他参数界面—您必须每次进入CCIS时都执行这一步才能查看其他参数界面。●如何在CCIS模式下操作机器人屏幕上的选项:
●在菜单中出现选项的时候: 请轻柔且缓慢地滚动履带,你可以推动Vector,可以切换菜单选项。
●如何在菜单中选择并执行该选项: 轻柔且缓慢地将Vector的胳膊完全抬起,然后再降到到底部,表示选择并确认该选项。
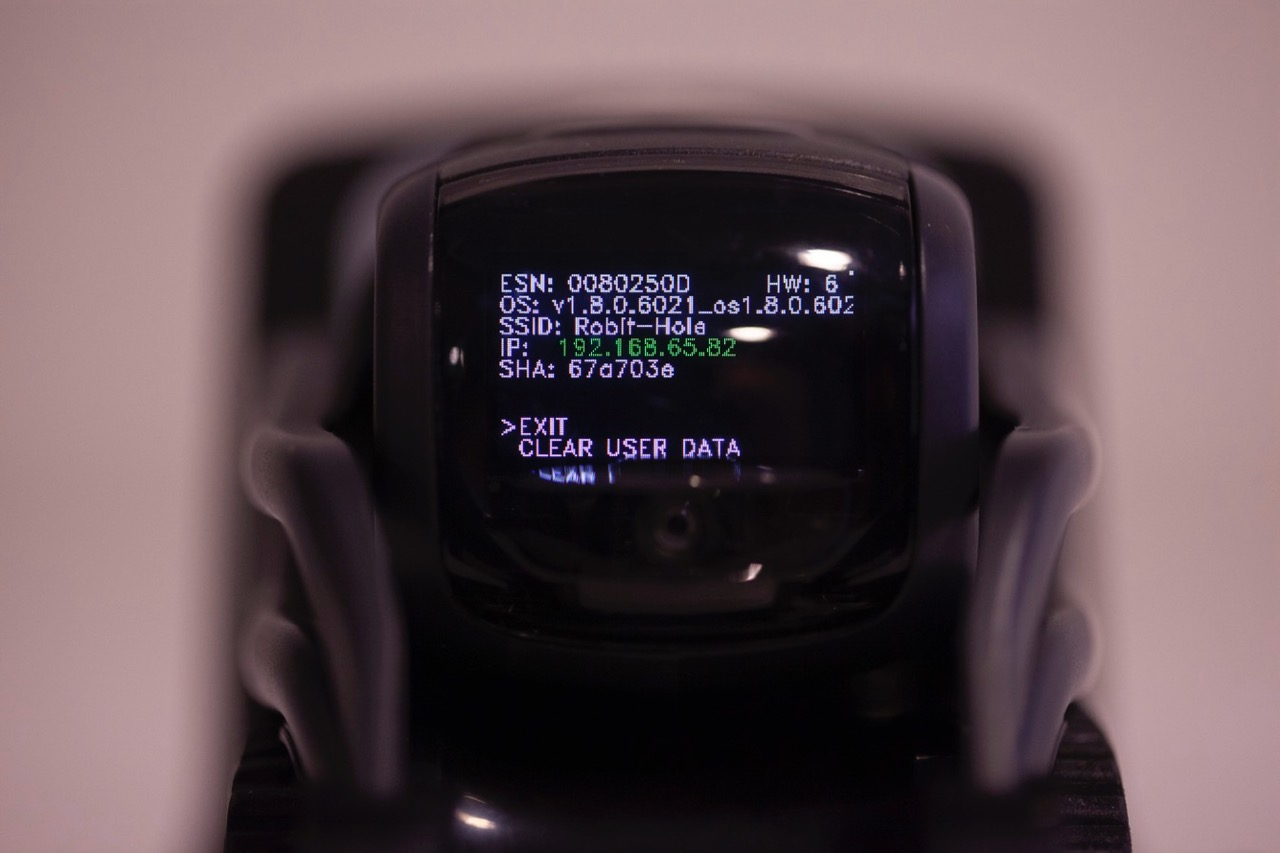
●屏幕1:软件参数
●ESN:代表这台Vector的SN序列号。
1.共八个字符
2.在Anki型号上,序列号以“00”开头
3.在DDL型号上,序列号以“0dd”开头
●OS(系统固件):Vector当前运行的系统版本号。
●SSID:这是Vector目前连接的无线网络名称。
●IP:Vector在路由器上被分配的局域网IP地址。
●SHA:安全哈希算法签名。
●底部菜单选项:
1.EXIT(退出CCIS模式)
2.CLEAR USER DATA (清除用户数据)(更多信息请参见如何重置Vector)
●屏幕2:社交网络
●BLE ID:Vector通过蓝牙对外广播的名字。
通常格式为“Vector”,后加4位数字标识符,例如“Vector N4Y6”。●MAC:Vector网络接口硬件地址。
●SSID:Vector目前连接的无线网络名称。
●IP:Vector在路由器上被分配的局域网IP地址。
●时间戳:Vector连接到网络确定的时间。如果这条信息是空白或以前时间的,Vector可能会有连接问题。
●NETWORK:显示网络状况的联通或者断开的结果。可能的代码有:
1.AVAILABLE(当前网络已连接就绪) 当前网络 / 服务器 / 节点是在线的、能被连接。
2.CONNECTIVITY(连通性检查) 正在测能不能连上外网 / 对方服务器。
3.TLS(加密安全握手中) 正在走 HTTPS/TLS 加密流程,建立安全加密通道,防止数据被窃听、篡改。
4.AUTH(身份验证 / 鉴权) 正在核对账号、密码、密钥、token、证书登录校验环节。
5.BANDWIDTH(带宽测速) 正在测网速:上行 / 下行能跑多快,评估能下载不卡。
6.CHECKING...(全局检测中) 上面几项正在逐一跑流程,还没出最终结果,耐心等校验跑完。

●屏幕3:电池、温度与导航
●SYS:SysCon底层系统版本。
●CLF:Vector底部四个悬崖传感器的数值。从左到右的顺序是:
1.前左 2.前右侧 3.后左 4.后右侧
●DIST:Vector前方红外探头能“看到”前方的距离测量。数字越小,Vector前方的障碍物越接近。
●TOUCH:(触摸传感器)Vector背部触摸传感器检测到的输入值,位于四个麦克风之间(用金色勾边)。
1.如果用手触摸金色传感器,这个数值应会波动。
●BATT:电池的电流和电压数值。
●CHGR:充电底座为Vector提供的电压。
1.当Vector和底座断开时,这个数值应该是测量为0。
2.当Vector放在底座上且充电头通电时(最低直流5V/1A)时,预期电压范围为4.8-5.0V。
●TEMP(温度)::Vector头部(H)和底部主板(B)的当前温度。这些数据可能会根据环境温度、Vector活动频率及其他因素而波动。
1.正常运行时的续航时长,取决于环境温度(头部,“(H)”):52摄氏度至80摄氏度(底部主板,“(B)”):34摄氏度 - 54摄氏度
2.超过这些范围后,Vector将无法正常工作,可能会出现到以下过热症状:
●a.电机使用可能会被停止。
●b.可能会显示带有温度计的房间图标。
●c.在严重过热情况下,机器人可能会突然自动关闭以防损坏。

●屏幕4:移动
●ACC:显示Vector加速度计监测的每个轴的测量值。这些数值分别为:
1.Z轴 2.Y轴 3.X轴
●GYRO(陀螺仪):显示ACC(加速度计)值在各轴(第一个值为Z轴,第二个值为Y轴,第三个值为X轴)的测量变化率。

●屏幕5:定位
●HEAD(头部):头部相对于Vector身体的角度。
1.标准范围为-21度至46度。
2.明显超出该范围都可能导致错误。
●LIFT(抬升器):抬升器/机械臂组件相对于Vector身体的角度。
1.标准范围为-15度至45度。
2.明显超出该范围都可能导致错误。
●LSPEED:显示左轮履带的行进速率。
●RSPEED:显示右轮纹的行进速率。
1.除非Vector正在移动或用户手动转动履带,否则应始终保持在0.00mm/s。

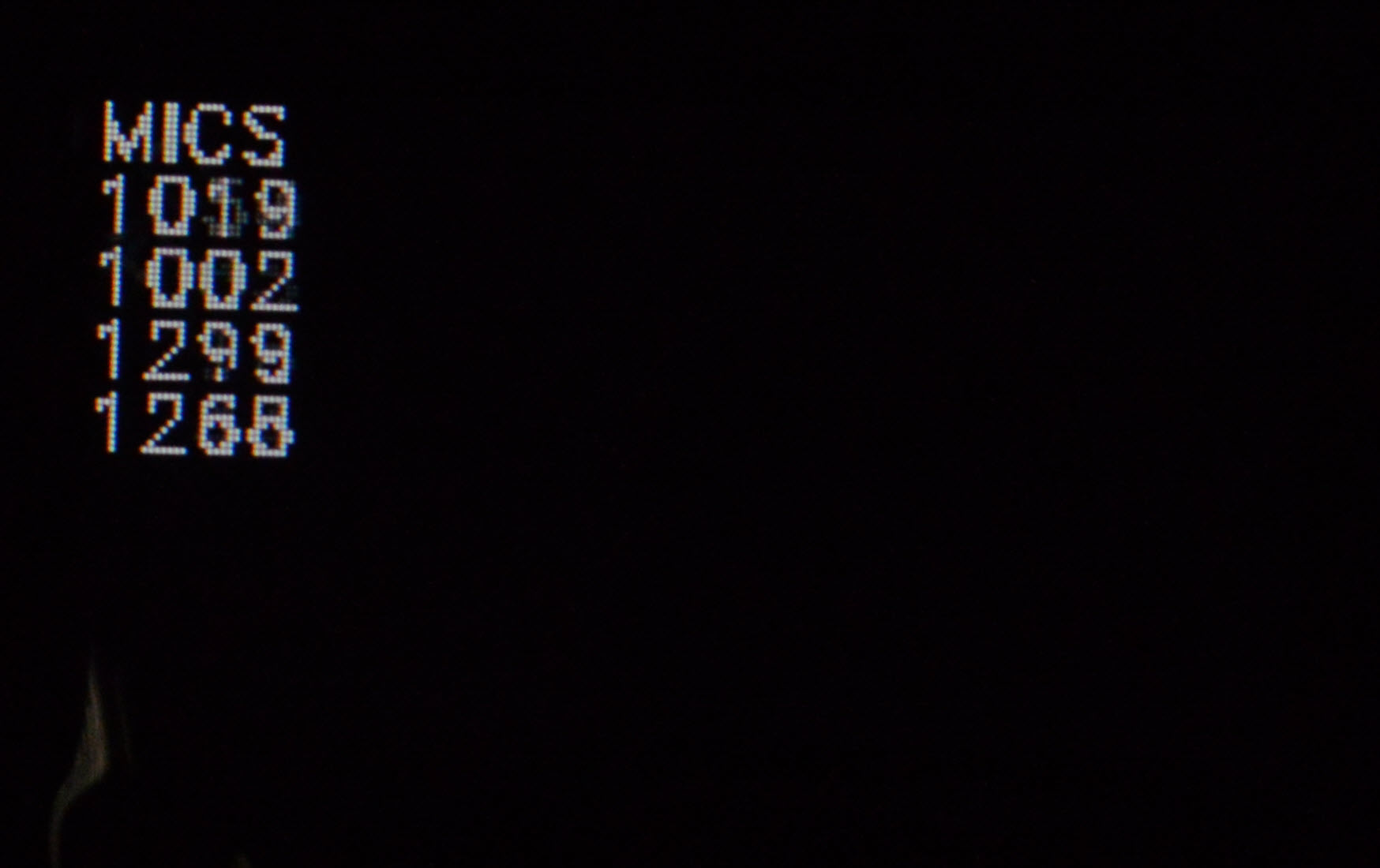
●屏幕6:麦克风
●MICS(麦克风):显示麦克风的数值及其对环境或定向噪声的检测,例如附近的对话或机器人收到的指令。
1.麦克风非常灵敏。这些数值即使在近乎静默的情况下也应始终波动。
a.麦克风读数缺少波动很可能表明硬件故障,可能导致语音口令识别和/或拍拍和噪声检测能力下降。
2.按以下顺序显示:
a.后左 b.前左 c.后右侧 d.前右侧<
●屏幕7:声音分析 该界面仅在OSKR/开发机器人上提供。
●三维定向麦克风可视化:显示机器人对声音来源的解读。
1.当前听到的声音以“尖峰”或方向圆中的条形显示。
2.最后听到声音的方向在圆圈边缘用红色方块标注。

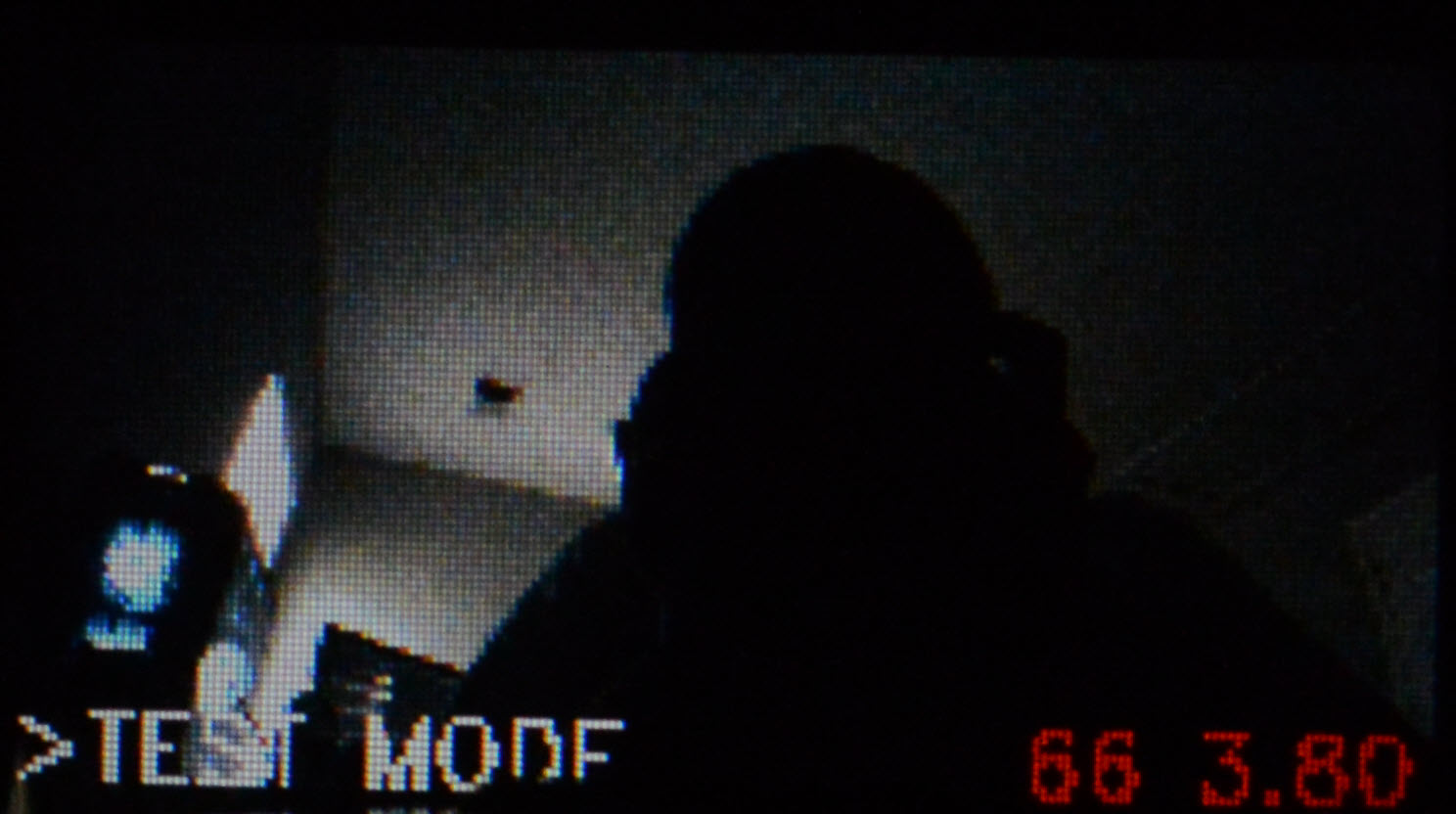
●屏幕8:摄像机测试模式 该界面仅在OSKR/开发机器人上提供。
●相机测试模式:显示机器人的摄像头画面。
1.抬起胳膊再放下时,可以在屏幕上显示摄像头画面的同时,实现标准机器人行为。这对于测试物体识别模型以及机器人在识别物体时表现出的行为非常有用。
修订版 2022年4月27日
最后更新于2022年8月25日